本软件用于航测项目的各个阶段,可以使用程序内置的相机和无人机数据,也可以自定义相关数据,快捷地计算并显示航测的相关数据,作为航测作业人员的重要参考,降低作业人员的计算难度,提高计算效率;并且对于分区情况进行粗略概算,以便对分区有个初步了解。
- 程序界面
程序界面包含三个分块,分别为:
1.“航测设备”:包含选择各种相机、无人机的型号,并自动匹配相应设备参数,也可以自定义参数;
2.“航拍参数”:调整详细参数,并实时得到相关航测数据。
3.“分区计算”:根据分区大小以及前面提到的各种参数,计算分区内相关数据,以便对分区航测情况简单了解。
- 航测设备
在“相机”下拉菜单中,列举了经常使用的相机型号,选中相应的相机后,对右侧的影像尺寸、感光器尺寸、像元尺寸、镜头焦距信息进行快速赋值,程序内置数据见表1。
相机选择“自定义参数”时,可以解锁相机参数文本框,可以自定义相关参数进行计算。
表1 相机参数
| 相机 | 影像宽度 | 影像高度 | 传感器宽度 | 传感器高度 | 镜头焦距 |
| Canon 5D | 4368 | 2912 | 35.9 | 24 | 35 |
| Canon 5D Mark2 | 5616 | 3744 | 35.9 | 24 | 35 |
| Canon 5D Mark3 | 5760 | 3840 | 35.9 | 24 | 35 |
| Canon 5D Mark4 | 6720 | 4480 | 35.9 | 24 | 35 |
| Canon 6D | 5472 | 3648 | 35.9 | 24 | 35 |
| Canon 6D Mark2 | 6240 | 4160 | 35.9 | 24 | 35 |
| DJI Phantom 4 | 4000 | 3000 | 6.16 | 4.62 | 3.6 |
| DJI Phantom 4 Pro | 5472 | 3648 | 13.2 | 8.8 | 8.8 |
| DJI Phantom 4 RTK | 5472 | 3648 | 13.2 | 8.8 | 8.8 |
| Nikon D750 | 6016 | 4016 | 35.9 | 24 | 35 |
| Nikon D810 | 7360 | 4912 | 35.9 | 24 | 35 |
| SONY A5100 | 6000 | 4000 | 23.4 | 15.6 | 20 |
| SONY A6400 | 6000 | 4000 | 23.4 | 15.6 | 35 |
| SONY A7R | 7360 | 4912 | 35.9 | 24 | 35 |
| SONY A7R2 | 7952 | 5304 | 35.9 | 24 | 35 |
| SONY A7R3 | 7952 | 5304 | 35.9 | 24 | 35 |
| SONY A7R4 | 9600 | 6400 | 35.9 | 24 | 35 |
| SONY NEX-5N | 4912 | 3264 | 23.4 | 15.6 | 20 |
| SONY NEX-7 | 6000 | 4000 | 23.4 | 15.6 | 20 |
| SONY RX100 | 5472 | 3648 | 13.2 | 8.8 | 20 |
| 禅思 L1 | 5472 | 3648 | 13.2 | 8.8 | 8.8 |
| 禅思 P1 | 8192 | 5460 | 35.9 | 24 | 35 |
| 禅思 Zenmuse X5 | 4608 | 3456 | 17.3 | 13 | 15 |
| 禅思 Zenmuse X5S | 5280 | 3956 | 17.3 | 13 | 15 |
| 禅思 Zenmuse X7 | 6016 | 4008 | 23.4 | 15.6 | 35 |
| 赛尔 PSDK 102S | 6000 | 4000 | 23.4 | 15.6 | 35 |
| 赛尔 PSDK 202S Pro | 7952 | 5304 | 35.9 | 24 | 40 |
| DJI Mavic 3E | 5280 | 3956 | 17.3 | 13 | 12.3 |
| 飞思 iXU-RS1000 | 11608 | 8708 | 53.4 | 40 | 50 |
在“无人机”下拉菜单中,列举了经常使用的无人机型号,选中相应的无人机后,对于相机设备可以快速匹配,并且下方的航测参数区域内的“航拍高度”和“飞行速度”等信息进行快速赋值,减少手动调整。
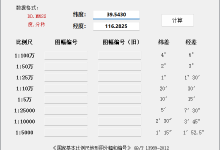
图1 航测计算器计算实例

- 航拍参数
根据相机参数的设定和无人机设备的选取,可以展示多种与航测相关的数据,既可以快速计算避免出错,也可以根据相关数据进行无人机飞行任务的可行性判断,如:“航拍间隔”不得小于相机最小曝光间隔、“像点位移”须小于规范规定的像点位移值(超限变为红色显示)、“地面分辨率”符合相应的绘图比例尺要求等等。
- 分区计算
分区计算根据界面现有的数据,简要地计算了分区的面积、航程、时间、照片数量等信息,对于分区航测概况有一个简单的了解,便于后续工作展开有个预估。
- 程序说明
- 程序编写及相关计算公式依据《1:500 1:1000 1:2000地形图航空摄影规范》(GB/T 6962-2005);
- 成图比例尺根据《低空数字航空摄影规范》CH/T 3005-2021:1:500 ≤ 0.05m;1:1000 ≤ 0.08m;1:2000 ≤ 0.16m(推荐)显示;
- 相机参数采用相机的官方标称数据,每部相机都会有误差,其计算误差对于航测作业前计算数据的影响可以忽略;
- 如果相机下拉菜单中没有使用的相机型号,请使用自定义相机参数进行计算。