成都纵横自动化技术股份有限公司的纵横CW-10C机型在航空摄影测量工作中使用较为普遍,简述其航拍产生的位置和姿态数据导入CC中的办法。
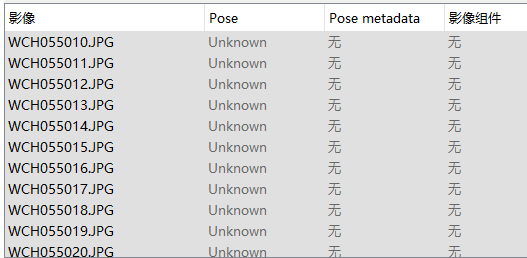
未导入位置和姿态数据的数据样式
首先由纵横无人机配套的PPS 后差分 GPS 解算软件计算得出需要的照片位置及姿态数据,数据文件分析如下
1、 默认姿态数据文件格式
GPSDiff_Extraction.dat

2、 JOUAV自驾仪姿态数据文件格式
GPSDiff_Extraction_PhotoFormat.dat

部分原始数据:
3 2018-09-28T11:05:05 3770922.30367447 625158.75881499 1423.99 -2.217347 -0.452637 170.294516 157.322751 25.826 WCH015003 443105727.424500 2018/09/28 11:05:05.727 1
4 2018-09-28T11:05:09 3770839.06588468 625196.30582230 1424.13 -1.025594 0.000000 167.303676 155.896086 25.989 WCH015004 443109248.126300 2018/09/28 11:05:09.248 1
5 2018-09-28T11:05:12 3770757.75445136 625234.39227315 1424.58 0.338045 -0.194806 166.942713 155.678363 26.117 WCH015005 443112687.929000 2018/09/28 11:05:12.688 1
6 2018-09-28T11:05:15 3770676.03214832 625271.53745902 1424.72 0.143239 -0.876625 170.626831 157.013354 25.955 WCH015006 443116127.626300 2018/09/28 11:05:16.128 1
7 2018-09-28T11:05:19 3770594.07510463 625306.92791487 1424.27 -1.438124 -0.601606 171.491998 157.443073 25.855 WCH015007 443119567.782100 2018/09/28 11:05:19.568 1 选择POS数据文件导入CC软件
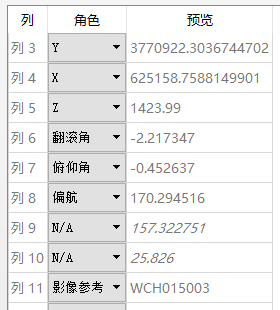
在“数据属性”中,空间参考坐标系选择数据对应的坐标系,勾选“导入角元素”
角 度: Heading,Pitch,Roll(deprecated)
相机方向: X 左,Y 下
角度单位: 度数

字段
- Y —— 北方向
- X —— 东方向
- Z —— 海拔
- Roll —— 滚转角
- Pitch —— 俯仰角
- Heading ——偏航
- 影像参考 —— 照片名称
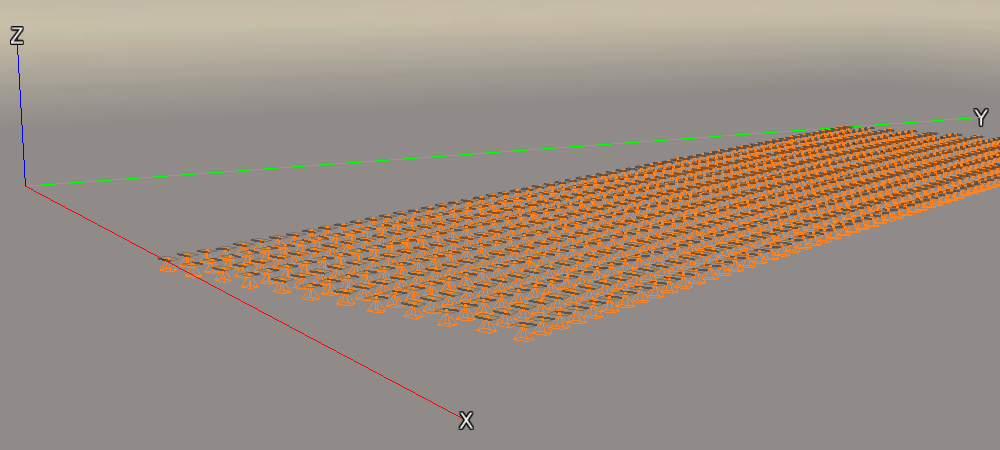
照片的位置和姿态数据导入完成,效果如图:
注意:只针对纵横CW-10C型号。
注意:纵横CW-30的后处理软件和处理结果似乎与该型号不同,但更改设置参数后皆可导入。