使用 ContextCapture Center,您可以快速为各种类型的基础设施项目生成最大尺寸、最具挑战性的现状三维模型,包括源自任何数码照片的与整个城市同样大小的规模,还支持最精密复杂的航空相机系统和 UAV 采集系统。不需要昂贵的专业化设备,您就能快速创建细节丰富的三维实景模型,并使用这些模型在项目的整个生命周期内为设计、施工和运营决策提供精确的现实环境背景。
实景建模的简易操作流程
新建项目
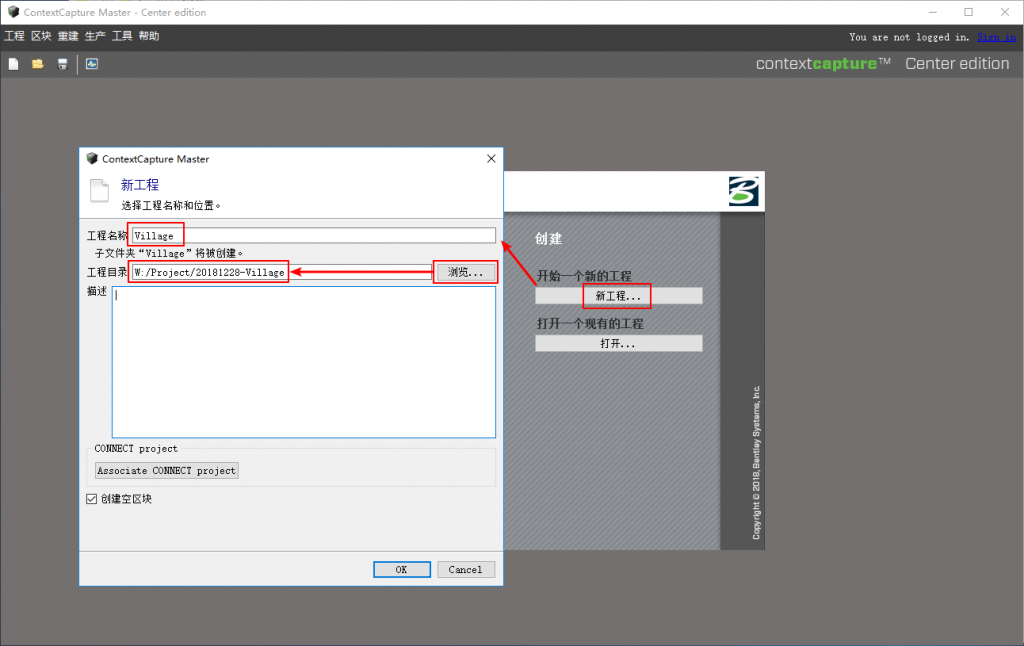
打开 ContextCapture Center Master 软件,点击 新工程… ,填写 工程名称 ,选择 工程目录 ,完成并单击 OK ,完成工程的新建。
导入航拍影像
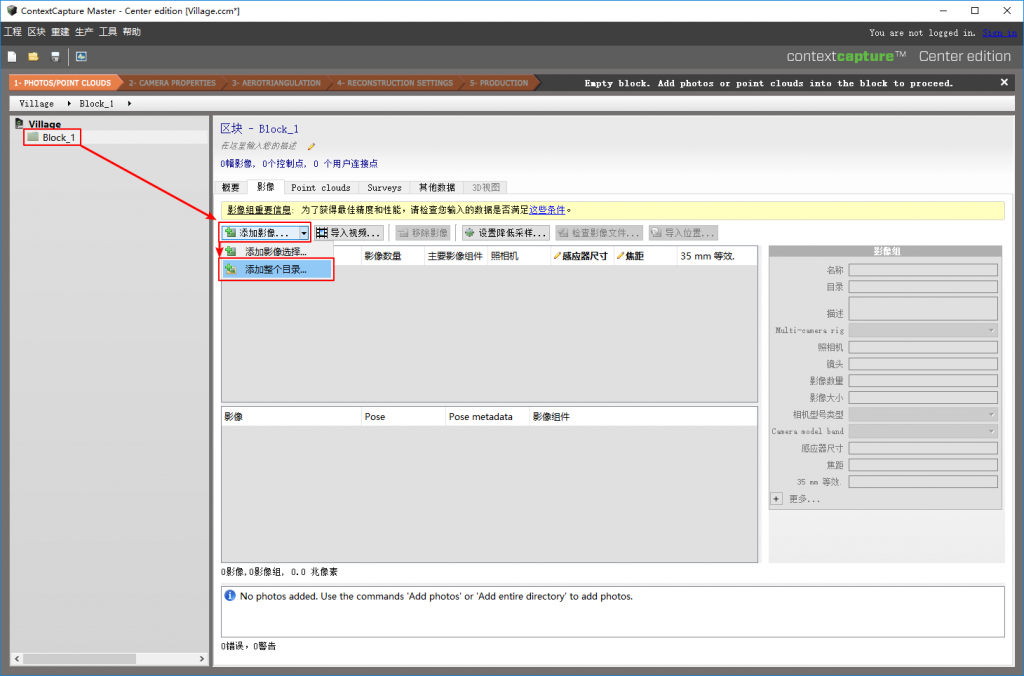
点击 Block_1 区块,选择 影像 选项卡,点击 添加影像… —— 添加整个目录 ,选择照片所在目录,完成导入。
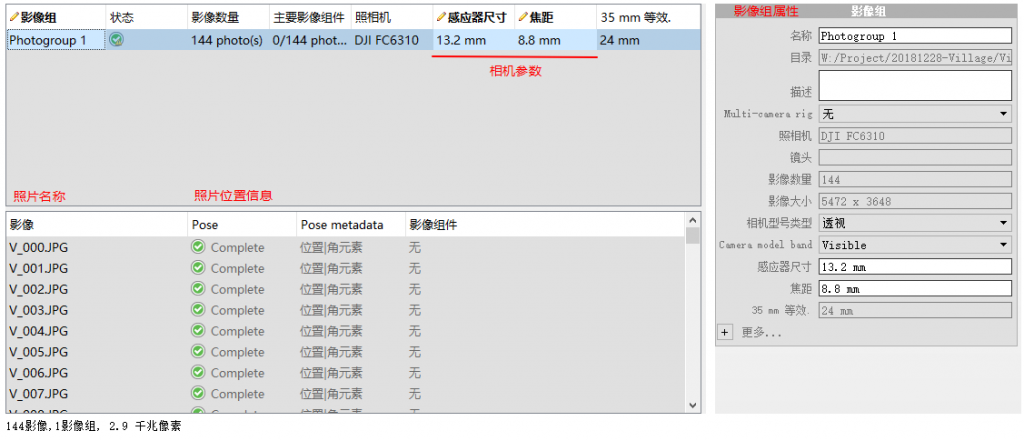
导入完成后,可以看到默认的相机参数、照片名称、对应的位置信息,没有影像组件信息。
导入像控点
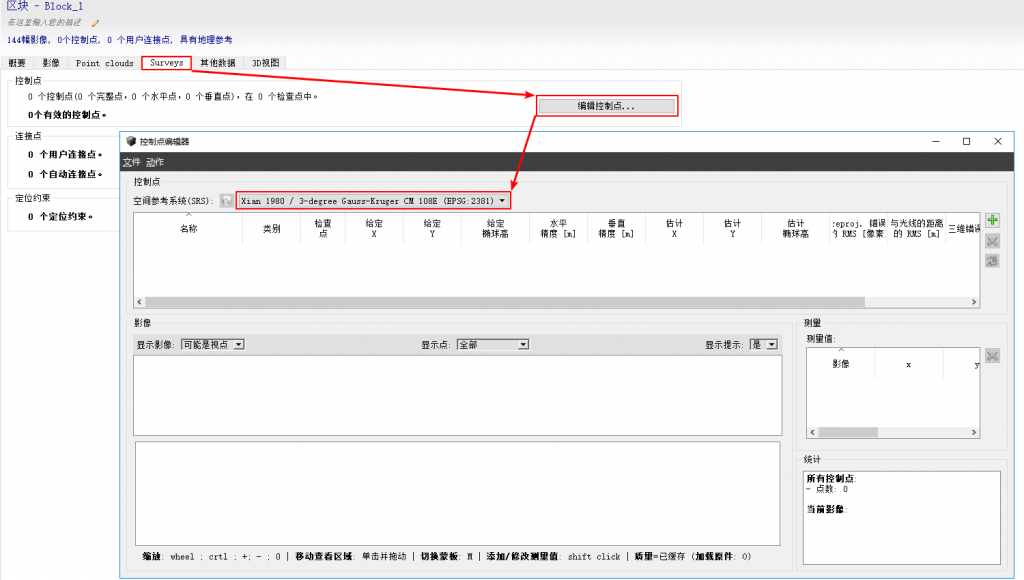
选择 Surveys (测量)选项卡,点击 编辑控制点… ,在 空间参考系统(SRS) 选择像控点的坐标系统,并在该窗口的 文件 — 导入 中完成导入。
刺点
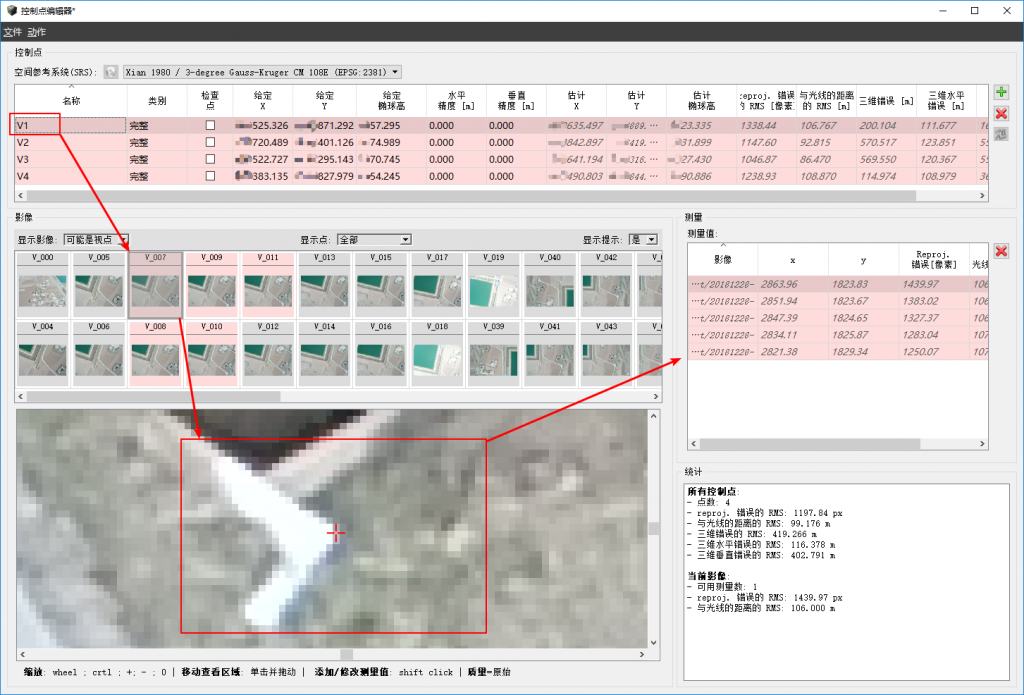
选择需要刺点的像控点,在下面的窗口中,选择刺点的照片,根据像控点及照片的对应关系,摁住Shift点击鼠标左键 进行刺点。右侧窗口显示为该点的刺点信息,检查并保存完成刺点作业。
提交空三解算
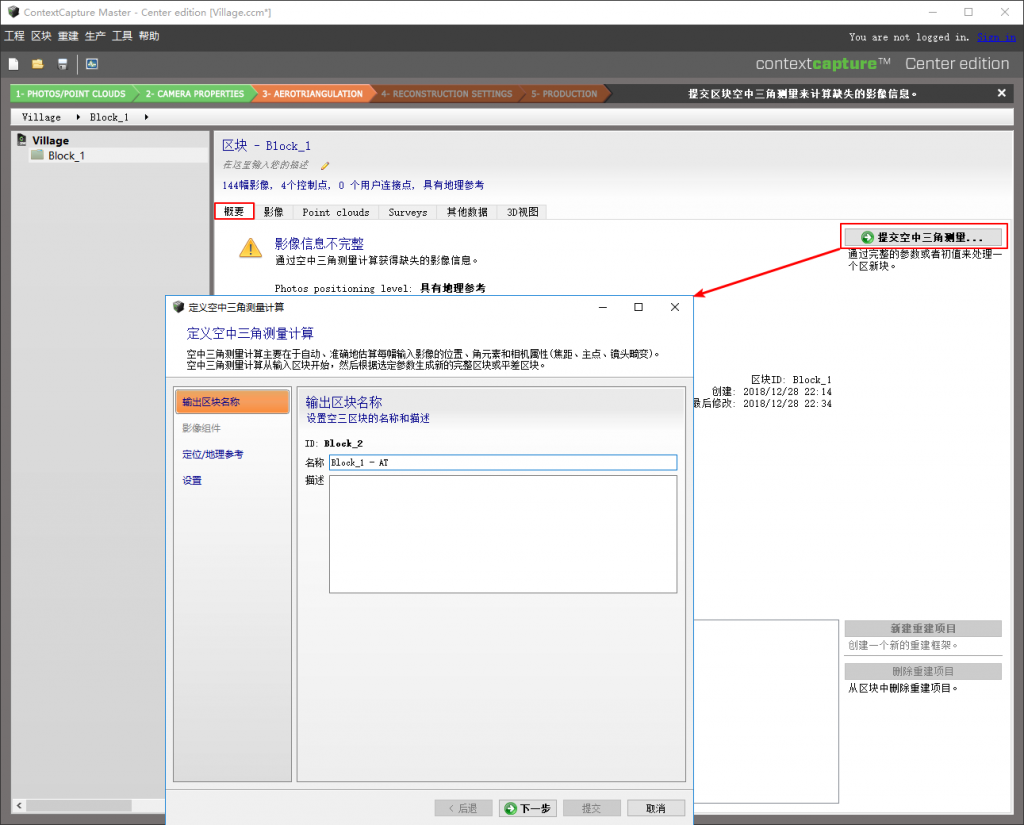
选择 概要 选项卡,点击右侧 提交空中三角测量… 。
在弹出默认对话框中,一般采用默认设置,最后 提交 该步骤。
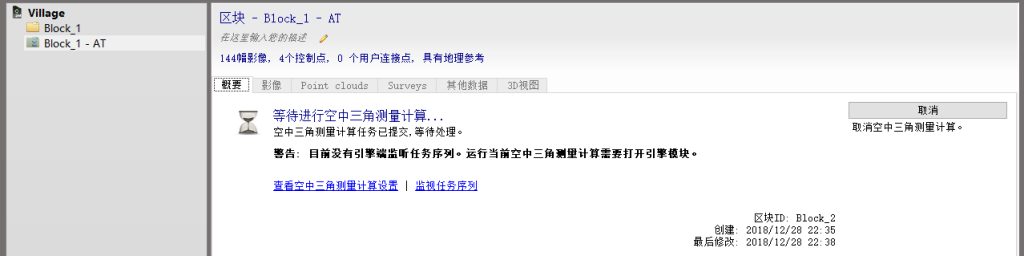
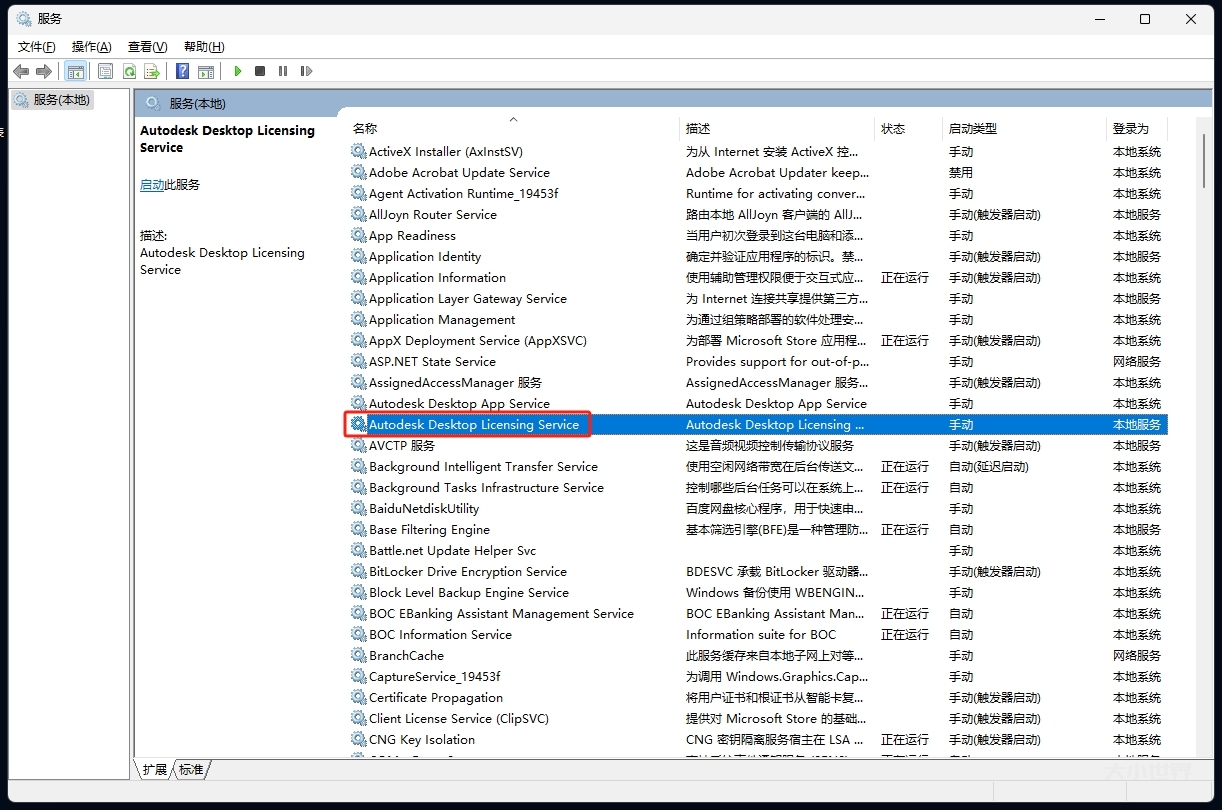
等待:目前没有引擎监听任务序列。运行当前空中三角测量计算需要打开引擎模块。
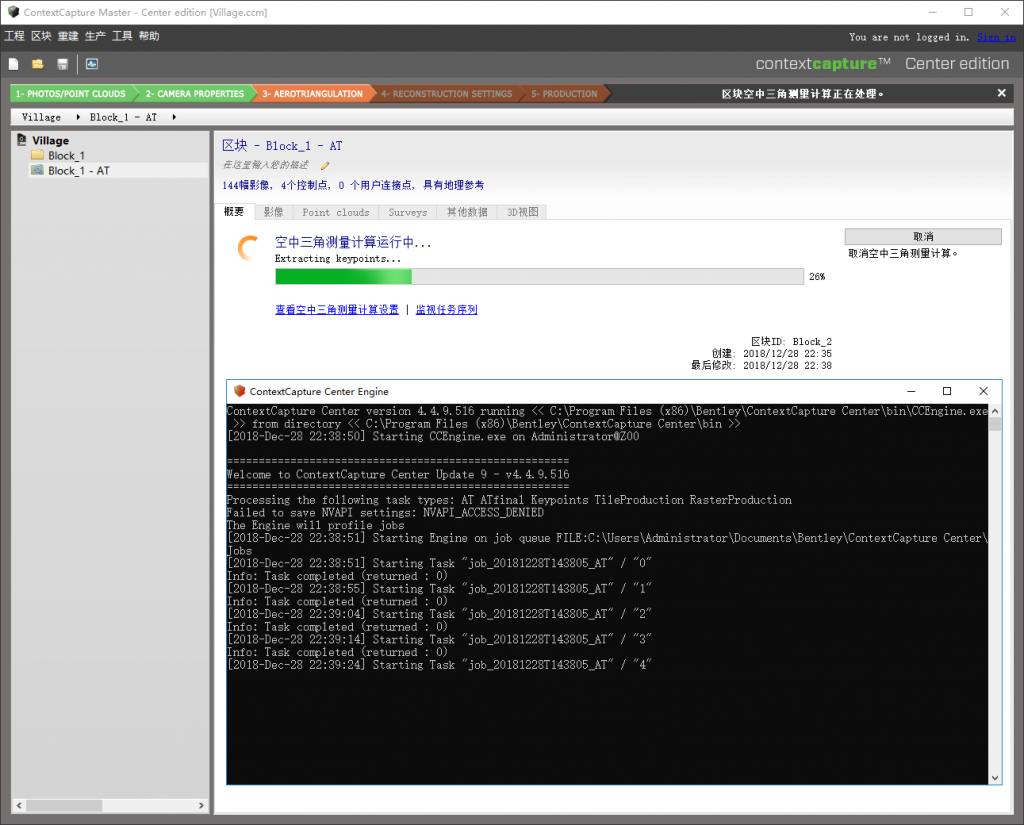
此处提示的“引擎模块”指的是 ContextCapture Center Engine ,运行该CMD程序至后,即可开始软件的自动空三解算。后续的建模任务同样需要该引擎处于打开状态。
检查空三精度
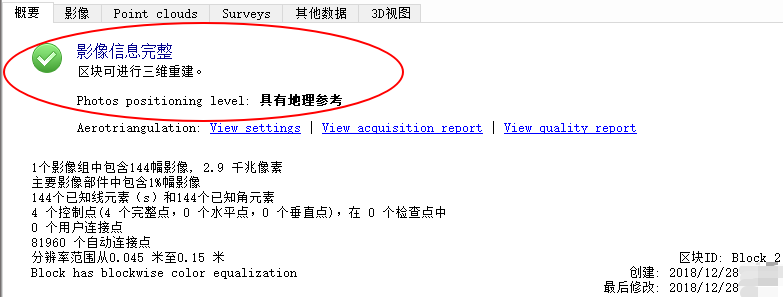
完成空三解算后,概要选项卡会提示如图所示。需要对空三结果进行简单的检查。

- 检查1:在 编辑控制点… 中查看连接精度,红色方框内的数字越小越好。
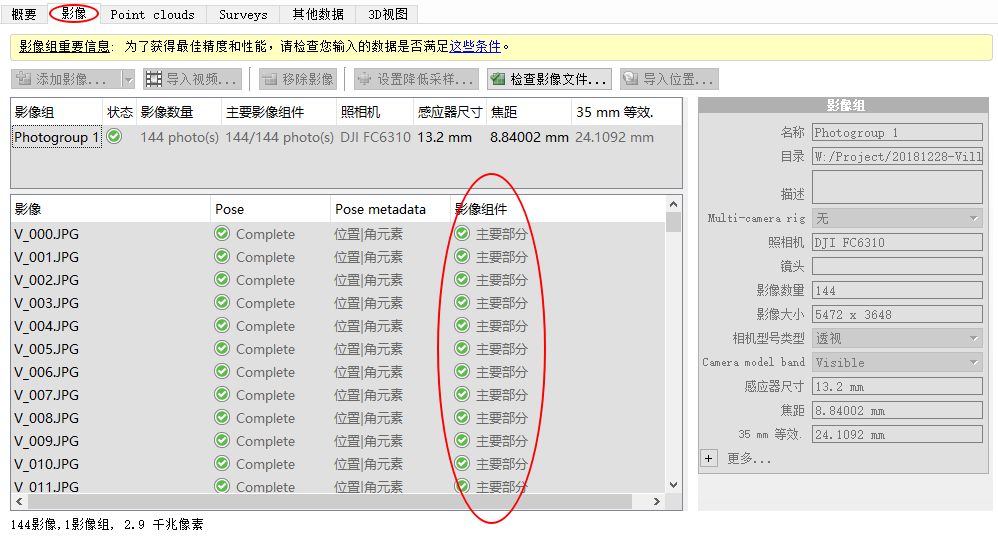
- 检查2:在 影像 选项卡中,查看影像对应的影像组件是否完整。
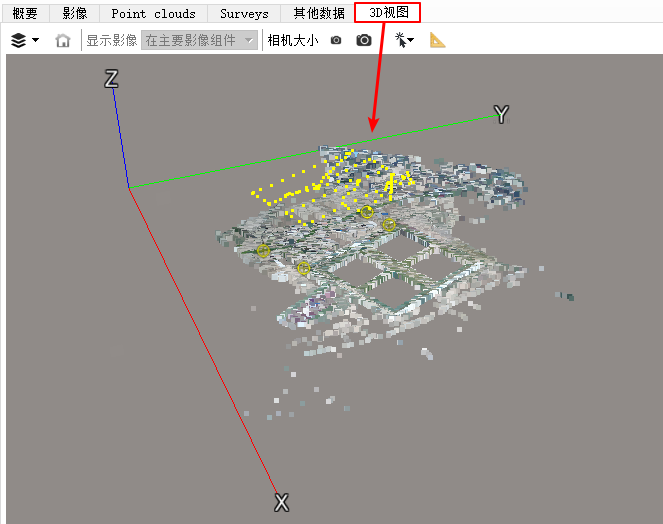
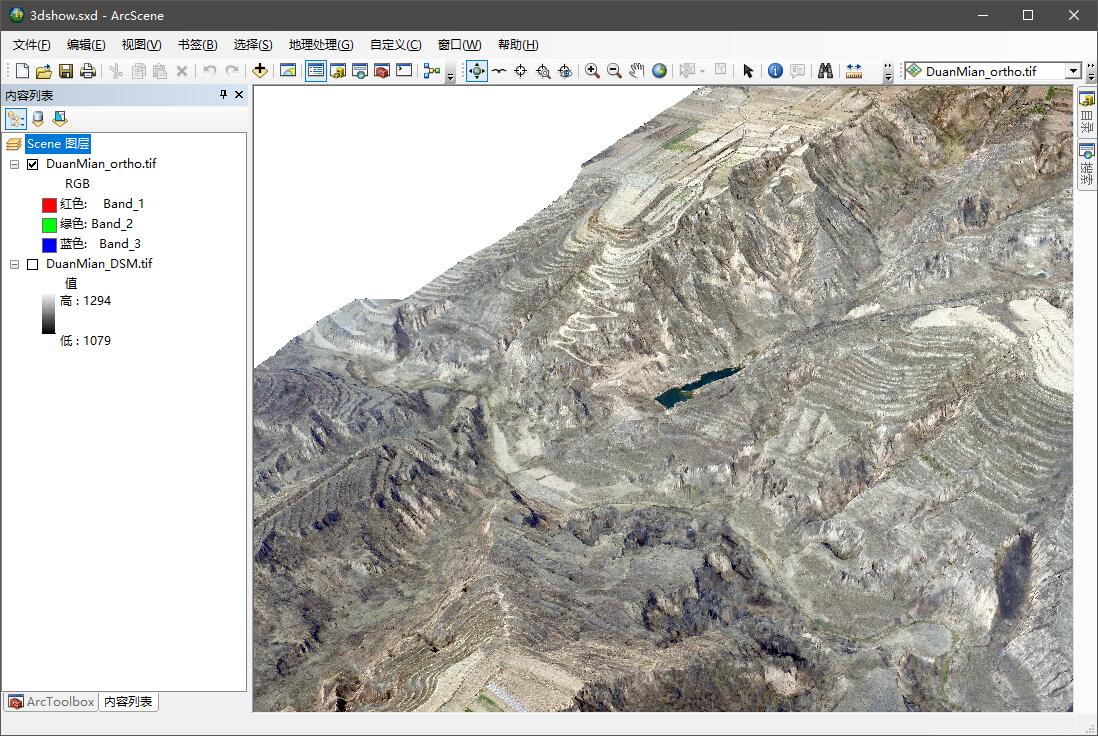
- 检查3:在 3D视图 选项卡中,查看空三得出的稀疏点云是否符合实际情况。
完成简单的检查之后,即表示完成了空中三角测量的计算。
设置空间框架
在进行建模作业之前,需要设置 空间框架 完成前置设置。

选择 概要 选项卡,单击右下角 新建重建项目 ,在重建项目中即产生了一个新的项目 Reconstruction_1 。
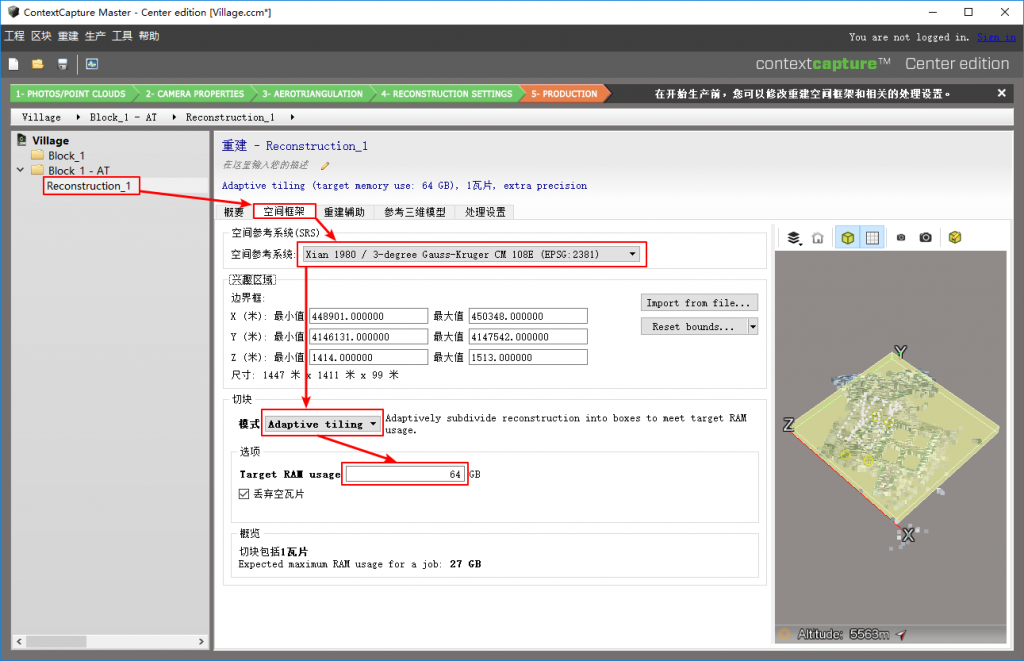
选择 Reconstruction_1 项目,选择 空间框架 选项卡,设置 空间参考系统 为像控点的坐标系统,切块模式选择 Adaptive tiling (自适应切块), Target RAM usage 设置为电脑的内存大小数字,这样才能保证任务顺利完成。
提交建模任务
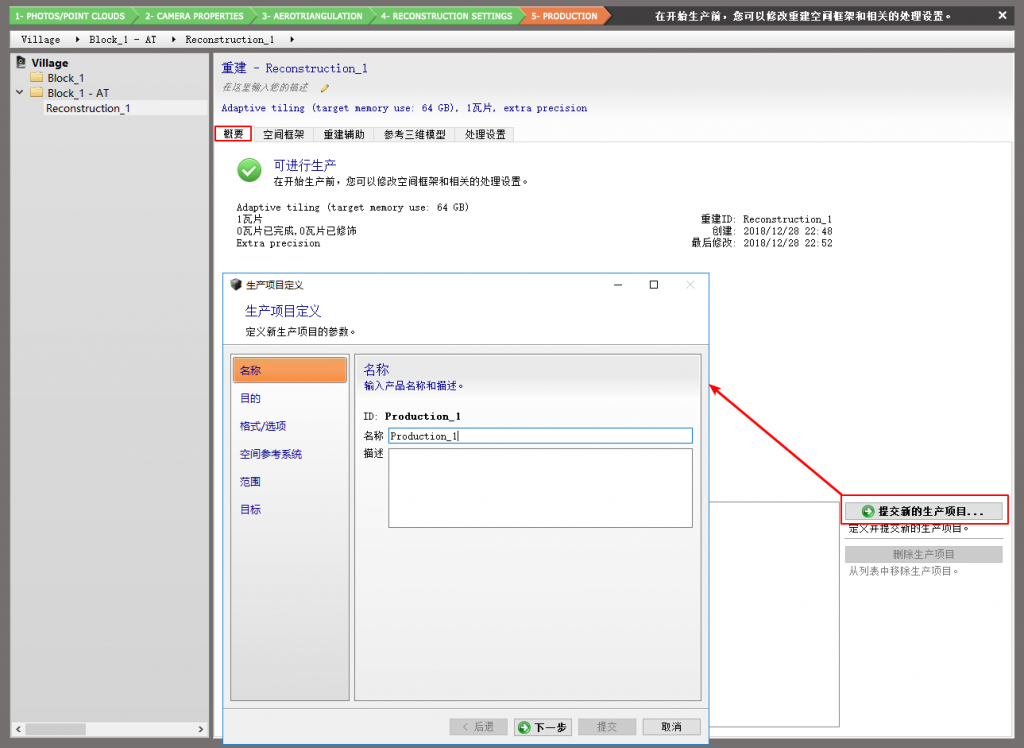
选择 概要 选项卡,右下角单击 提交新的生产项目…
1.名称 根据需要修改;
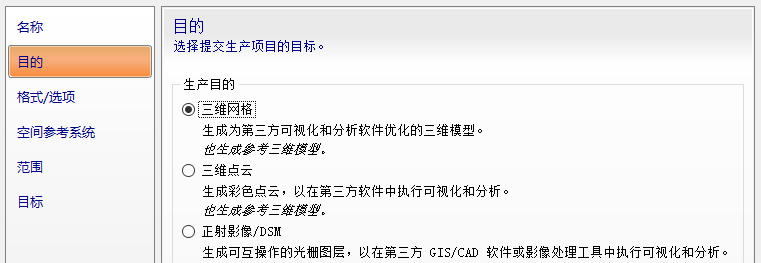
2.目的 一般选择 三维网络 或 正摄影像 ,可以根据需要选择;
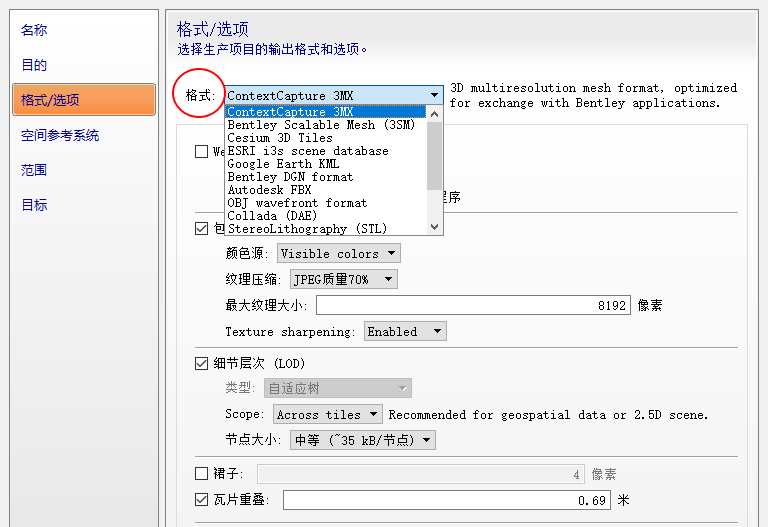
3.格式/选项 一般需要的格式为:3MX、OSGB、OBJ等……
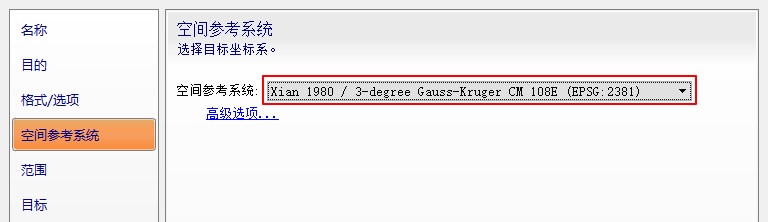
4.空间参考系统 选择与像控点的坐标系统一致;
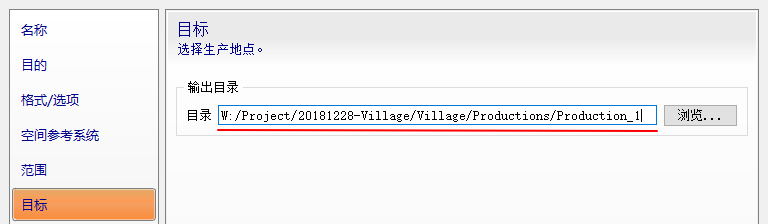
5.目标 可以选择修改输出目录
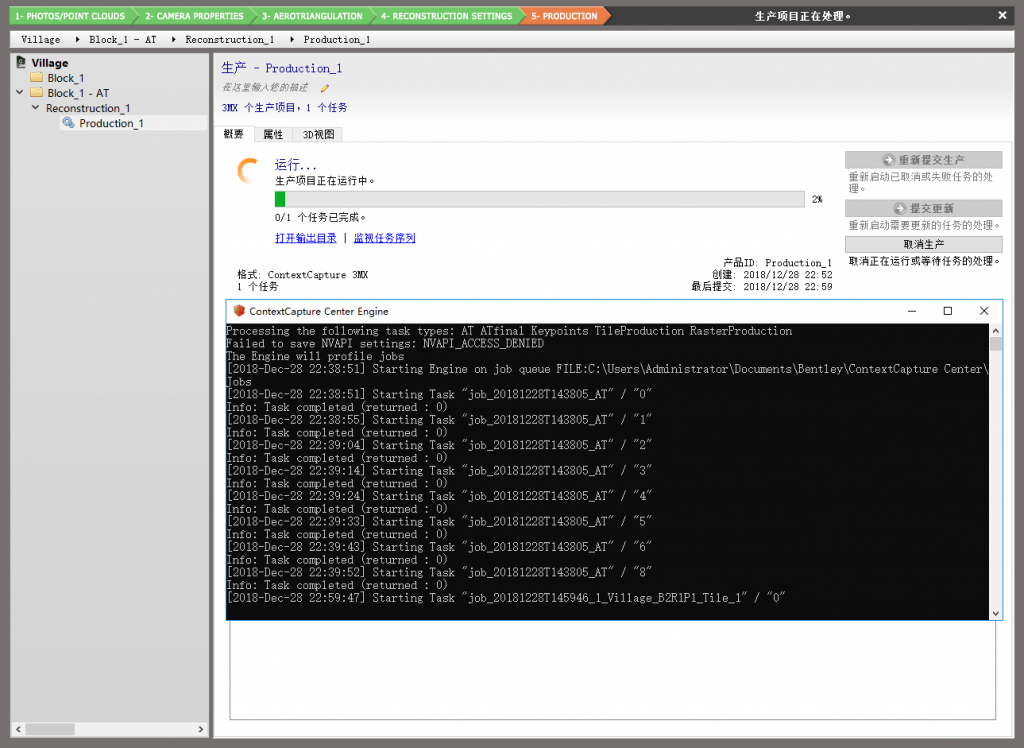
完成设置,提交项目,打开引擎开始生产。
完成建模
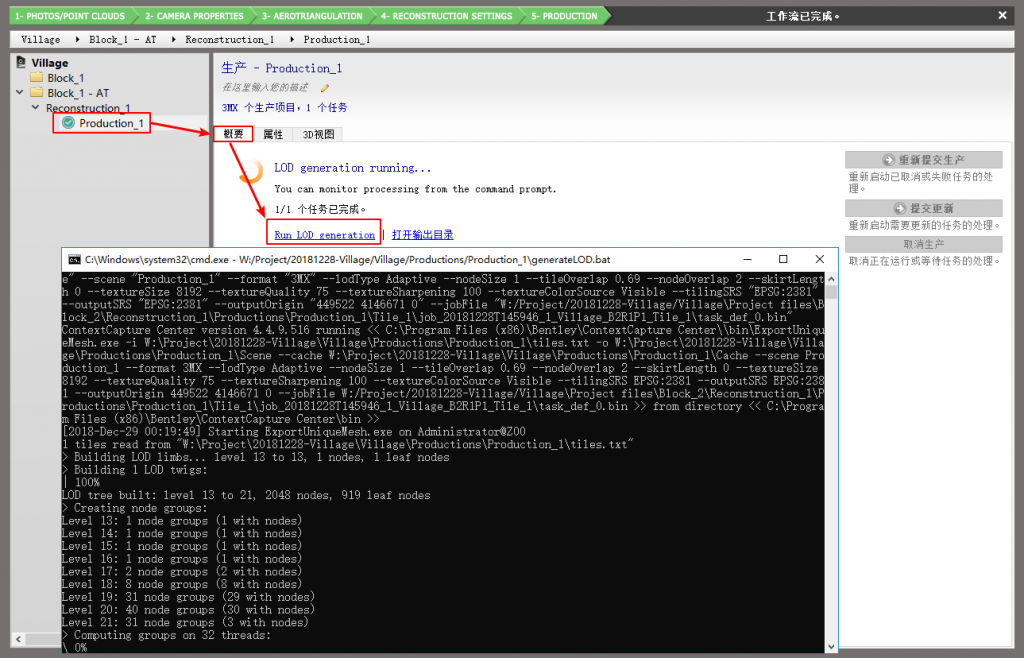
选择生产完成的 Production_1 ,选择 概要 选项卡,单击 Run
LOD generate 重建LOD,等待完成。
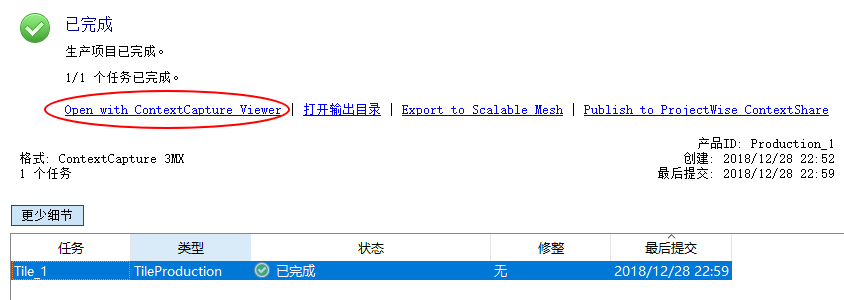
提示已完成。点击 Open With ContextCapture Viewer 即可在三维查看软件中看到3MX格式的三维实景模型。
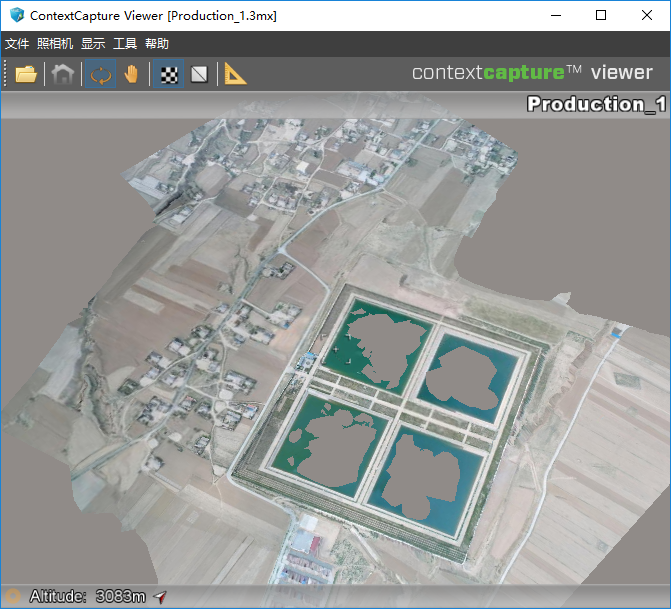
Well Done!





请问可以提供一下原始数据方便自己学习吗,谢谢
并不提供数据支撑哈,而且数据量都蛮大的,
其实自己手机拍个静物也是可以做出模型的,CC对数据质量要求并不高。
你好,请问我照片导入后航飞线路交叉不在一个平面是为什么
忙没顾上看网站~应该是你的POS出了问题~
检查一下是不是部分时段GNSS信号丢失导致位置漂移,或者有可能坐标系不正确!
您好,我想请教你的那个投影变形里的几个值的填写问题 那三个值我要怎么填写
你应该在那个帖子底下回复消息……
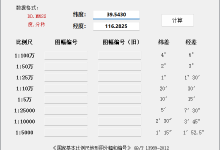
ym1、ym2分别为A、B两点的横坐标值,ym求其平均值参与计算。
Hm表示投影面高程。
需要恶补一下投影变形的概念了啊同学~
呵呵,那个帖子关闭评论功能了,我现在的一个测区 有控制点成果 我想计算这个测区每个点的高斯投影变形是否超2.5/km,如果超了我要怎么选择中央子午线及抵偿高.你的这个软件y1 y2 是指的一个点的y坐标值和中央子午线的投影值(500000m)? 这个H是实际的85国家高程值?
感谢提醒,已回复,请移步~
投影变形计算器 v2018.01.27
请问一下,您网站展示的模型是怎样子发布的web的?
在3MX产品导出的时候第一个复选框就是可以发布的格式,将导出的完整目录上传到网站目录,选择打开html的网页文件即可!
能否详细说一下导出 web格式的过程