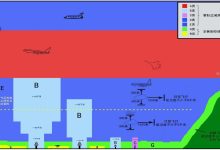
在固定翼飞机中,本地坐标系通常是以飞机的中心位置为原点(0,0)。下面是固定翼飞机中常见的本地坐标系定义:
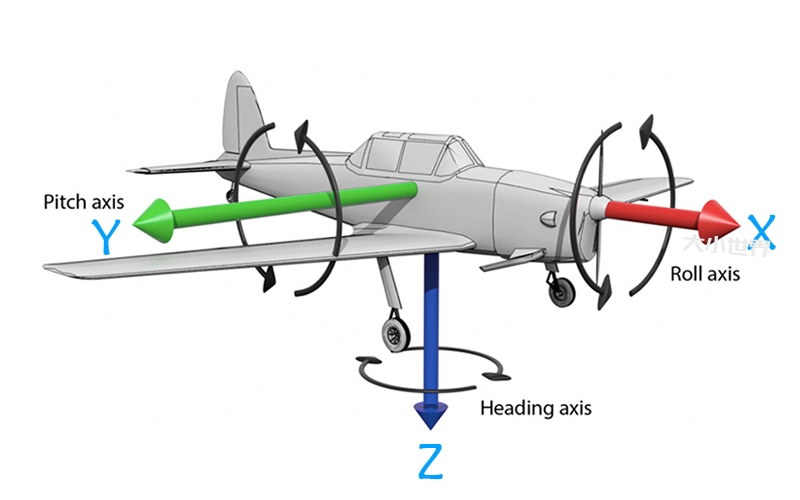
1、X轴(前进轴——纵轴):
- 指向飞机的前进方向,从飞机尾部指向机头。
- 正方向通常与飞机的航向角(航向)一致。
- 沿X轴(纵轴)——前后移动。
- 绕X轴(纵轴)——滚转运动。
- Roll,滚转角,Φ:是机体坐标系Z轴与通过机体X轴的铅垂面间的夹角,即机体向右滚为正,反之为负。
2、Y轴(右侧轴——横轴):
- 垂直于X轴,指向飞机的右侧翼。
- 正方向通常与飞机的滚转角(滚转)一致。
- 沿Y轴(横轴)——左右移动。
- 绕Y轴(横轴)——俯仰运动。
- Pitch,俯仰角,θ:是机体坐标系X轴与水平面的夹角;当X轴的正半轴位于过坐标原点的水平面之上(抬头)时,俯仰角为正,否则为负。
3、Z轴(下轴——立轴):
- 垂直于X和Y轴,指向地面。
- 正方向通常与飞机的俯仰角(俯仰)一致。
- 沿Z轴(立轴)——上升下降。
- 绕Z轴(立轴)——航向运动。
- Yaw,偏航角,ψ:是机体坐标系X轴在水平面上的投影与地面坐标系X轴之间的夹角,由X轴逆时针转至机体X的投影线时偏航角为正,即机头右偏航为正,反之为负。

航空领域把欧拉角叫作泰特-布莱恩特角(Tait-Bryan angle),由pitch(俯仰角)/roll(横滚角)/yaw(导航角)构成。